What is the difference between high availability and fault tolerance?
Overview
This article explores the pros and cons of a high availability cluster versus a fault tolerant system by looking at hardware constraints, software failures, RTO, RPO...
The following comparative tables explain in detail the difference between a fault tolerant system and SafeKit, a software high availability cluster.
What is high availability?
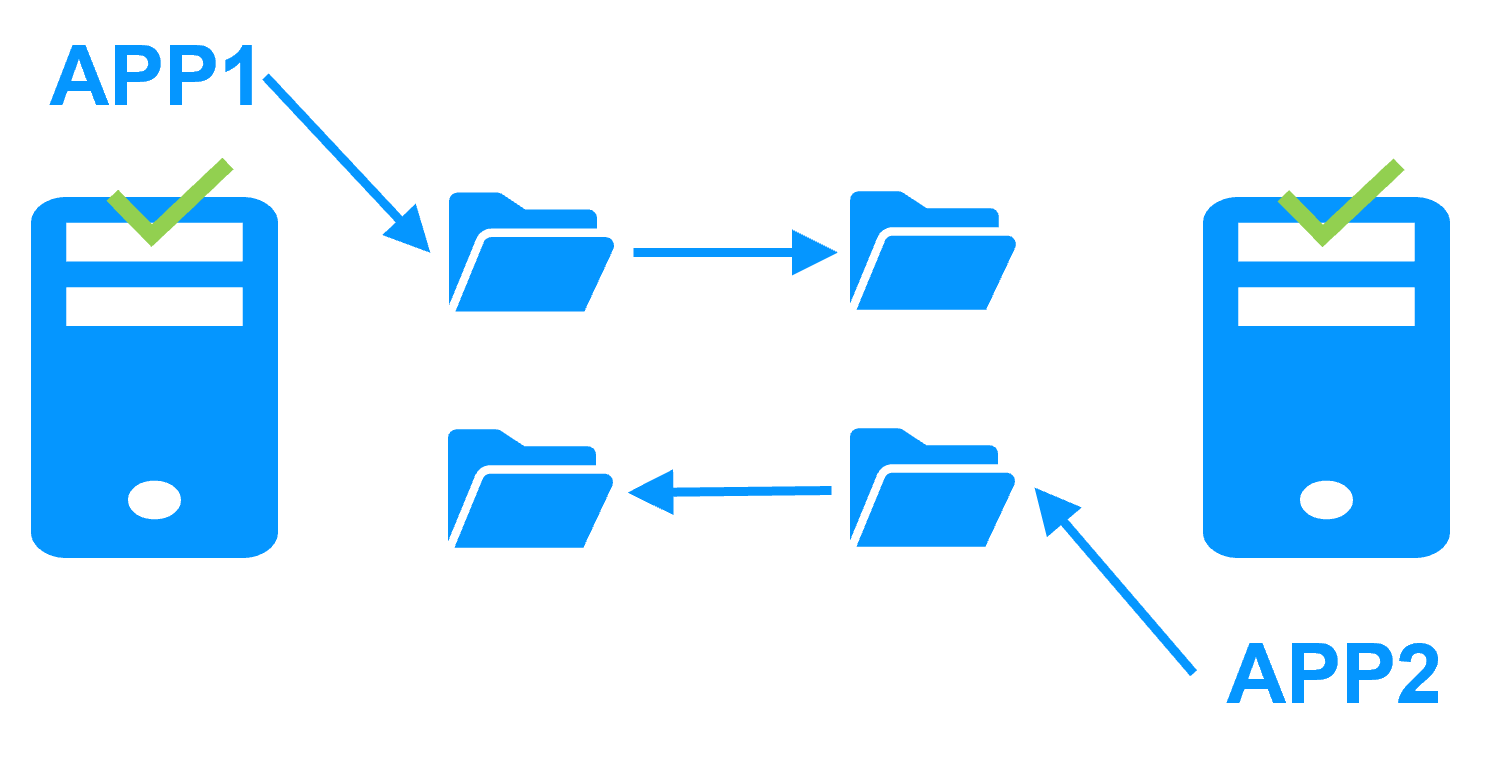
A high availability cluster is based on two servers with restart of the critical application in the event of hardware or software failures. There are 2 types of clusters: hardware clusters and software clusters.
Hardware clusters are based on shared disks resulting in dependencies between servers and their connections to shared disk arrays.
Software clusters like SafeKit are based on real-time data replication and are hardware-agnostic: they can be deployed on physical or virtual servers or in the cloud.
What is fault tolerance?
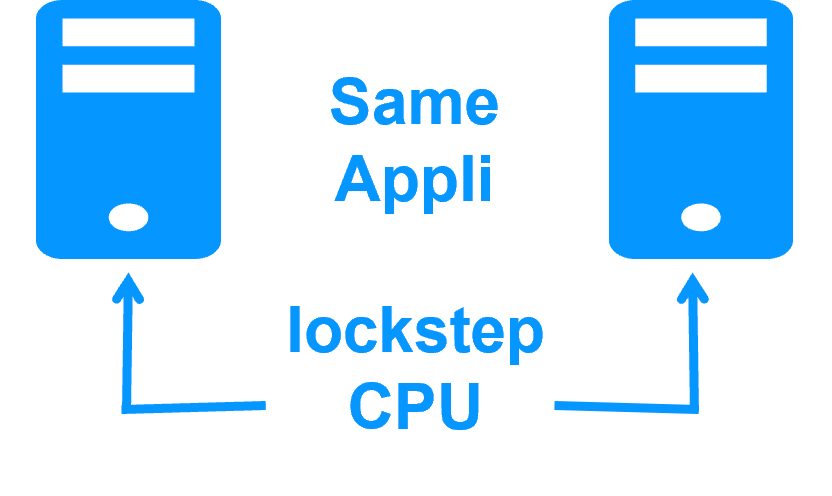
A fault tolerant system relies on either specialized hardware or specialized hypervisor to detect a hardware failure and instantly switch to a redundant hardware component without application restart.
Fault-tolerant systems only deal with hardware failures and not software failures, by far the most common reason for system downtime.
Pros and cons of high availability and fault tolerance